


武漢中觀RigelSLAM大空間手持激光3D掃描儀
武漢中觀RigelSLAM大空間手持激光3D掃描儀

RigelSLAM是中觀推出的首款針對大空間的手持激光3D掃描儀,它采用實時定位與建圖技術(shù)(即SLAM技術(shù),Simultaneous Localization and Mapping),不依賴GPS等GNSS定位,在室內(nèi)、外等各種未知環(huán)境下,均可在移動中進(jìn)行自身定位及增量式三維建圖。Rigel SLAM致力于為用戶提供簡單、靈活、快捷、高精度的大場景三維測量解決方案。
產(chǎn)品特點:
1.卓越算法精細(xì)捕獲
性能卓越的SLAM算法,捕捉毫厘之微,在各種復(fù)雜場景下,均能保證掃描完美閉合,點精度最高0.7cm (50m處)
2.實時建圖導(dǎo)出即用
掃描過程中實時建圖并可實時預(yù)覽,掃描完成無需后處理,建圖結(jié)果導(dǎo)出即用,作業(yè)效率大幅提升
3.雙型齊發(fā)靈活選擇
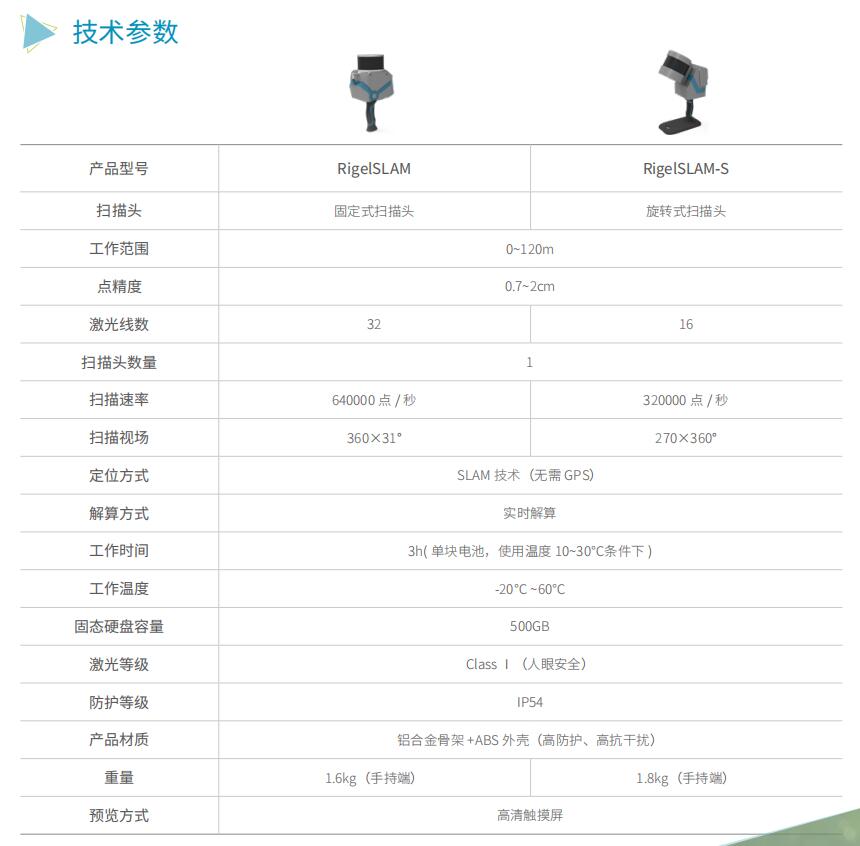
RigelSLAM設(shè)計有固定式掃描頭和旋轉(zhuǎn)式掃描頭兩種型式,固定式相對更輕便、成本更低,旋轉(zhuǎn)式采集更高效且不留死角,兩種型式靈活適應(yīng)不同企業(yè)需求
4.室內(nèi)室外自由移動
內(nèi)置高精度慣性導(dǎo)航系統(tǒng),不會跟蹤丟失,可在室內(nèi)狹小空間或室外空曠環(huán)境下自由移動
5.經(jīng)久耐用無懼風(fēng)雨
具備超強(qiáng)耐候性,可在-20°℃~~60°℃環(huán)境下作業(yè),防護(hù)等級IP54

卓越算法精細(xì)捕獲
>>>性能卓越的SLAM算法,捕捉毫厘之微,在各種復(fù)雜場景下,均能保證掃描完美閉合,點精度最高0.7cm (50m處)
室內(nèi)室外自由移動
>>>內(nèi)置高精度慣性導(dǎo)航系統(tǒng),不會跟蹤丟失,可在室內(nèi)狹小空間或室外空曠環(huán)境下自由移動
實時建圖導(dǎo)出即用
>>>掃描過程中實時建圖并可實時預(yù)覽,掃描完成無需后處理,建圖結(jié)果導(dǎo)出即用,作業(yè)效率大幅提升
經(jīng)久耐用無懼風(fēng)雨
>>>具備超強(qiáng)耐候性,可在-10℃~45℃環(huán)境下作業(yè),防護(hù)等級IP54
雙型齊發(fā)靈活選擇
>>>設(shè)計有固定式掃描頭和旋轉(zhuǎn)式掃描頭兩種型式,固定式相對更輕便、成本更低,旋轉(zhuǎn)式采集更高效且不留死角,兩種型式靈活適應(yīng)不同企業(yè)需求

軟件特性
1.自主定位
采用SLAM技術(shù)在未知環(huán)境中進(jìn)行自身定位,不依賴GNSS信號
2.實時建圖
掃描過程中實時建圖,數(shù)據(jù)導(dǎo)出即用,所見即所得,無需后處理
3.實時瀏覽
內(nèi)置高清觸摸屏,可在掃描過程中實時瀏覽點云數(shù)據(jù),并進(jìn)行三維交互,保證數(shù)據(jù)采集準(zhǔn)確完整
4.控制點采集
掃描過程中支持控制點采集功能,配合后處理軟件,可將采集數(shù)據(jù)轉(zhuǎn)入控制點絕對坐標(biāo)系


客戶使用價值
1.智能化、輕量化設(shè)計
輕巧便攜,開機(jī)即用,即便是數(shù)字測繪新手,也可一人輕松進(jìn)行測量工作
2.簡便高效
操作簡單,邊走邊采集,快速捕獲復(fù)雜數(shù)據(jù),建圖結(jié)果導(dǎo)出即用,大幅提升測量工作效率
3.適用于各種環(huán)境
適用于各種環(huán)境無需GPS定位,能在各種未知環(huán)境下,快速獲取地理空間信息,特別是復(fù)雜/封閉空間
4.經(jīng)久耐用
設(shè)備采用高防護(hù)抗干擾材質(zhì)具備超強(qiáng)耐候性
更多相關(guān)

武漢中觀RigelSLAM大空間手持激光3D掃描儀
武漢中觀RigelSLAM大空間手持激光3D掃描儀 RigelSLAM是中觀推出的首款針對大空間的手持激光3D掃描儀,它采用實時定位與建圖技術(shù)(即SLAM技術(shù),SimultaneousLo...
 環(huán)球測繪微信
環(huán)球測繪微信